
前回の記事では数値予報とその前後について観測から予報までの大まかな流れを概観しました。
今回はその続きで四次元データ同化、3次元、4次元変分法、アンサンブル、予報精度について、ごくごく簡単に考えていきます。一つ一つの説明というより流れとして見てください。
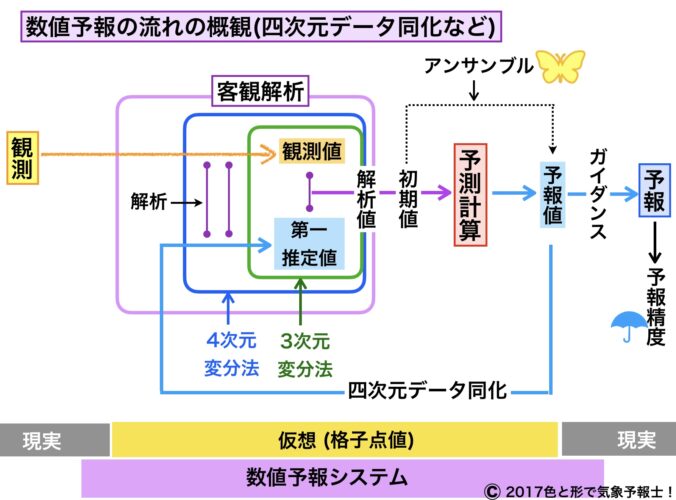
1.四次元データ同化
前回、コンピュータに予測計算をさせるには客観解析によって観測データから解析値を求め、それを計算の初期値とする作業が必要だと説明しました。
ところで、初期値を割り出すためにいつも観測データだけを頼りにしていると不都合が生じる場合があります。
予測計算は途切れず継続的に行われますが観測データは何かの原因で欠落することもあります。
また、海上のように観測所が少ない場所もあります。
そこで観測値にプラスして前回算出した直近の予報値(予測値)を用いて解析値を求めるという方法を取ります。
客観解析に用いられる前回の予報値を「第一推定値」と呼びます。
このように観測値と第一推定値を比較しながらより適切な解析値を決める方法が「四次元データ同化(解析・予報サイクル)」です。
2.3次元変分法
客観解析は決まった時刻(定時)に実行されます。
例えば毎日06時と18時の2回実行されるとします。
でも06時と18時の間でも細かい時間間隔で気象データが集まってきます。
それらのデータを全て定時に観測されたものとして扱うのが3次元変分法です。
3.4次元変分法
4次元変分法では定時以外に観測されたデータも有効に活用します。
つまり、定時と定時の間の期間においても、観測値と前回の予報値による解析を連続的に行います。
そうすることで前回の予報値が期間内の全ての観測値に近づくように修正されていきます。
結果として予報値の変動(曲線)がより良く再現され精度の良い予報結果を得ることができるようになります。
4.アンサンブル
アンサンブル予報においては、初期値にわざと僅かな誤差(揺らぎ)を与えた上で予測計算をさせます。
当然、予報値は当初の予測とは違った値になります。
同じように様々な誤差が与えられた複数の初期値により予測計算が実行されるので、予報値にばらつきが生じます。
予測の信頼度は予測のばらつきが小さければ高く、大きければ小さくなります。
アンサンブル予報は確率的予報に用いられます。
5.予報精度
予報精度とは予報がどれほど当たっているかを評価する方法です。
前回と今回の記事で数値予報の大まかな流れを取り上げましたが、詳細な内容は今後、順次記事にしていく予定です。